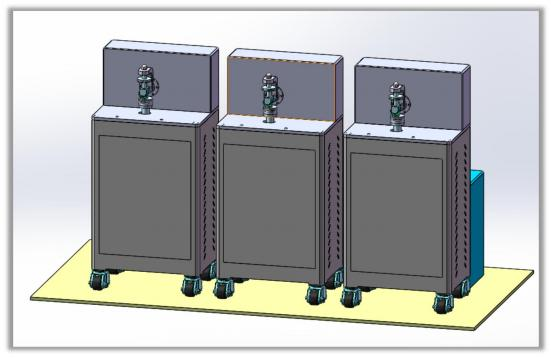
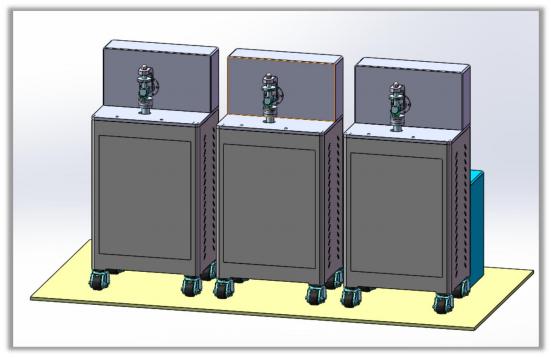
HH3 Ο ελεγκτής φθοράς της άρθρωσης του γόνατος αποτελείται από τρία μέρη: τον κεντρικό υπολογιστή δοκιμής, το εξάρτημα και το τμήμα ηλεκτρονικού ελέγχου. Μπορεί να προσομοιώσει τη φθορά, την κόπωση και το ξεφλούδισμα των εμφυτευμάτων γόνατος και άλλες διαδικασίες βλάβης και μπορεί να δοκιμάσει 3 αρθρώσεις γόνατος ταυτόχρονα Εμφυτεύματα.

1 .1 Χαρακτηριστικά
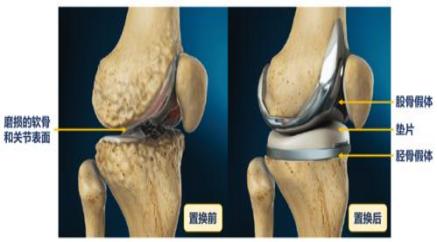
Ο ελεγκτής φθοράς της άρθρωσης γόνατος HH3 αποτελείται από τρία μέρη: κεντρικός υπολογιστής δοκιμής, εξάρτημα και ηλεκτρονικό τμήμα ελέγχου. Μπορεί να προσομοιώσει τη φθορά, την κόπωση και το ξεφλούδισμα των εμφυτευμάτων γόνατος και άλλες διαδικασίες βλάβης και μπορεί να δοκιμάσει 3 αρθρώσεις γόνατος ταυτόχρονα εμφυτεύματα. Αυτό το μηχάνημα δοκιμών ελέγχει αυτόματα τη δύναμη δοκιμής, το χρόνο δοκιμής και την ταχύτητα και μετρά τη δύναμη δοκιμής και τη ροπή σε πραγματικό χρόνο. Εφαρμόζεται στην κατασκευή, χρήση και έρευνα προθέσεων άρθρωσης γόνατος και άλλων συναφών ιατρικών πεδίων.
Ο άξονας κίνησης υιοθετεί εισαγόμενο σερβοκινητήρα και σύστημα ελέγχου AC, το οποίο μπορεί να πραγματοποιήσει αδιάκοπη ρύθμιση ταχύτητας και την απαιτούμενη. Υπολογίστε τη σταθερή ροπή/σταθερή αξονική δύναμη εξόδου εντός του εύρους στροφών. η δύναμη δοκιμής εφαρμόζεται χρησιμοποιώντας ένα σύστημα φόρτωσης με βιδωτό ελατήριο. Η δύναμη δοκιμής εφαρμόζεται σταθερά και αξιόπιστα και η δύναμη δοκιμής μπορεί να ρυθμιστεί από τον χειριστή στη διεπαφή του υπολογιστή. την ταχύτητα του άξονα, Οι παράμετροι όπως ο αριθμός των περιστροφών, η δύναμη δοκιμής και ο χρόνος δοκιμής ελέγχονται όλες από έναν υπολογιστή, ο οποίος μπορεί να συλλέξει δεδομένα δοκιμής σε πραγματικό χρόνο και να τα σχεδιάσει. Η αντίστοιχη καμπύλη δοκιμής μπορεί να κατασκευαστεί και τα δεδομένα ή η καμπύλη δοκιμής μπορούν να αποθηκευτούν, να ανακτηθούν και να εκτυπωθούν κατά βούληση.
Τριδρομικό σύστημα φόρτωσης με σερβοκινητήρα με διαφορετικά εξαρτήματα για πλήρη άρθρωση αρμού, περιστροφή, απαγωγή κάμψης και άλλες κινήσεις, η μονάδα αισθητήρα δύναμης τεσσάρων συστατικών ελέγχει την αξονική δύναμη ροπής, την οριζόντια ώθηση και την κάμψη αντίστοιχα Ροπή κατά την επέκταση , σερβο συγκρότημα τριών κατευθύνσεων εξοπλισμένο με περιστροφικό κωδικοποιητή υψηλής ακρίβειας, γωνία σε πραγματικό χρόνο μέτρηση και μετατόπιση και παρέχουν μια αποτελεσματική πηγή δεδομένων για τον έλεγχο του κεντρικού υπολογιστή.
Κάθε μηχανισμός κίνησης ελέγχεται και συντονίζεται ανεξάρτητα, με τρεις σταθμούς και 15 άξονες για την ολοκλήρωση της δοκιμής ζημιάς των εξαρτημάτων λείανσης των αρθρώσεων.
1.2 Κύριες προδιαγραφές
1. Λογισμικό λειτουργίας οργάνου με κινεζική διεπαφή λειτουργίας.
2. Το λογισμικό λειτουργίας οργάνων είναι έτοιμο για χρήση, δεν απαιτείται ειδικό λογισμικό.
3. Βαθμοί ελευθερίας: Κάθε δοκιμαστικός σταθμός μπορεί να πραγματοποιήσει κάμψη / επέκταση, εσωτερική περιστροφή / εξωτερική περιστροφή, κίνηση προς τα εμπρός / προς τα πίσω, τρισδιάστατο έλεγχο κίνησης και φόρτιση αξονικής δύναμης και κάθε βαθμός ελευθερίας μπορεί να ελεγχόμενη. Τόσο ο αισθητήρας όσο και η δύναμη ανιχνεύονται. Είναι δυνατή η ελεύθερη κίνηση προς τα μέσα / προς τα έξω και προς τα μέσα / προς τα έξω.
4. Η μη γραμμικότητα του αισθητήρα δεν είναι μεγαλύτερη από 0,10% της πλήρους κλίμακας και η υστέρηση δεν είναι μεγαλύτερη από 0, 10%, η επαναληψιμότητα δεν είναι μεγαλύτερη από 0,05% της πλήρους κλίμακας.
5. Εύρος αισθητήρα μετατόπισης και μετατόπισης: αξονική μετατόπιση 100 mm, κάμψη/έκταση 120, εσωτερική περιστροφή/Εξωτερική περιστροφή 20, πρόσθια / οπίσθια μετατόπιση 15 mm, μεσαία / πλευρική μετατόπιση 5 mm.
6. Χωρητικότητα φορτίου και εύρος αισθητήρα δύναμης: αξονικό φορτίο 3KN, εσωτερική/εξωτερική ροπή 20Nm, φορτίο εμπρός/πίσω 1KN.
7. Ακρίβεια ελέγχου δύναμης και μετατόπισης: Το σφάλμα δύναμης και πλάτους μετατόπισης εντός ενός κύκλου δεν πρέπει να υπερβαίνει το καθορισμένο μέγιστο. Το μέγιστο σφάλμα φάσης δεν πρέπει να υπερβαίνει το 3% του πλήρους κύκλου. Το όργανο ελέγχεται σύμφωνα με τα πρότυπα ISO 14243-1 και ISO 14243-3 σε κάθε ελεγχόμενο βαθμό ελευθερίας. Μετρημένες καμπύλες και τιμές απόκλισης αισθητήρων δύναμης και μετατόπισης .
8. Διαθέτει λειτουργία αναλογικής εισόδου οκτώ καναλιών και μπορεί να συγχρονιστεί με εξωτερικά δεδομένα.
9. Συχνότητα δοκιμής: 1Hz , ακρίβεια 0,1Hz.
10. Σύστημα ελέγχου: Θα πρέπει να είναι εξοπλισμένο με ξεχωριστό σερβοελεγκτή πολλαπλών σταθμών, πολλαπλών καναλιών για να επιτυγχάνεται αυτόματος έλεγχος δύναμης και μετατόπισης κλειστού βρόχου.
11. Ο ελεγκτής θα πρέπει να μπορεί να εκτελεί αντιστάθμιση ελέγχου τιμής κορυφής σε κοιλάδα για να διασφαλίσει ότι η τιμή κορυφής που απαιτείται από το σήμα μπορεί να επιτευχθεί με ακρίβεια όταν χρησιμοποιείται μια κυκλική κυματομορφή ως εντολή ελέγχου.
12. Θα πρέπει να είναι σε θέση να εφαρμόζει δοκιμές προγραμματισμού προσαρμοσμένων καμπυλών βάδισης. να είναι σε θέση να εκτελεί βήμα προς βήμα χειροκίνητο έλεγχο κάθε ελεγχόμενου βαθμού ελευθερίας. και να είναι σε θέση να εξάγει ακατέργαστα δεδομένα σε μορφή Excel.
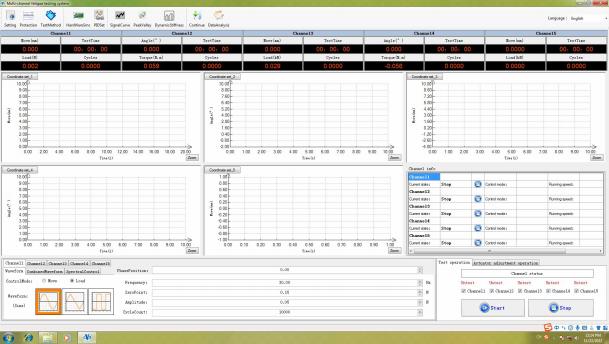
13. Κατά τη διάρκεια της δοκιμής , το λογισμικό θα πρέπει να μπορεί να αντικατοπτρίζει τις καμπύλες δύναμης και μετατόπισης κάθε σταθμού σε πραγματικό χρόνο και το σύστημα ελέγχου. Το σύστημα θα πρέπει να μπορεί να προσαρμόζει αυτόματα την καμπύλη κίνησης του δείγματος ώστε να ταιριάζει με την καμπύλη στόχο χωρίς μη αυτόματη παρέμβαση.
14. Ρυθμός ελέγχου κλειστού βρόχου σε πραγματικό χρόνο ≤ 6 kHz , εκτός από τη λειτουργία ελέγχου δύναμης και μετατόπισης, ο ελεγκτής θα πρέπει να μπορεί να Εφαρμόζει την υπολογισμένη λειτουργία μεταβλητού ελέγχου.
15. Η συχνότητα ψηφιακής δειγματοληψίας δεν πρέπει να είναι μικρότερη από 100 kHz και η μέθοδος δειγματοληψίας πρέπει να περιλαμβάνει: τιμή αιχμής, τιμή κοιλάδας, χρόνο χρόνου, μέγιστο, ελάχιστο, μέσο όρο , κύκλος / λογάριθμος κ.λπ.
16. Διαθέτει διπλή λειτουργία, λειτουργία λειτουργίας εντολής καναλιού ορίου ανάδρασης καναλιού.
17. Έχει τη λειτουργία αυτοελέγχου της διέγερσης του αισθητήρα που λείπει .
18. Θερμοκρασία: Η θερμοκρασία του λιπαντικού μέσου μπορεί να διατηρηθεί στους (37 ℃) και υπάρχει σύστημα ελέγχου θερμοκρασίας.
19. Λιπαντικό μέσο : Η επιφάνεια της άρθρωσης μπορεί να βυθιστεί στο λιπαντικό μέσο και το λιπαντικό μέσο θα πρέπει να σφραγίζεται χωρίς διαρροή. και εξοπλισμένο με συσκευή παρακολούθησης διαρροών.
20. Εξαρτήματα δοκιμής: εξοπλισμένα με τα απαραίτητα εργαλεία για δοκιμή, φόρτωση σταθμών εργασίας και φόρτωση για όλες τις κινήσεις Ο σταθμός εργασίας εμβάπτισης παρέχει τυπικά δείγματα αναφοράς για τη βαθμονόμηση του εξοπλισμού και την αντιμετώπιση προβλημάτων.
21. Κουμπί διακοπής έκτακτης ανάγκης: Ο εξοπλισμός πρέπει να είναι εξοπλισμένος με κουμπί διακοπής έκτακτης ανάγκης.
22. Προστασία ασφαλείας: Ο εξοπλισμός πρέπει να είναι εξοπλισμένος με ένα διαφανές και διαφανές θερμοπλαστικό πολυανθρακικό υλικό προστατευτικό κάλυμμα. Υπάρχει μια διάταξη κλειδώματος ασφαλείας. Όταν ανοίξει η πόρτα του προστατευτικού καλύμματος, ο εξοπλισμός θα πρέπει να μπορεί να σταματήσει αυτόματα τη δοκιμή.
1.3 Συνθήκες εργασίας
Σε θερμοκρασία δωματίου Εντός της περιοχής από 10 ℃~ 35 ℃;
Η σχετική υγρασία δεν είναι μεγαλύτερη από 80%.
Σωστή εγκατάσταση σε σταθερή βάση.
Σε καθαρό περιβάλλον χωρίς κραδασμούς, διαβρωτικά μέσα και ισχυρές παρεμβολές ηλεκτρομαγνητικού πεδίου.
Το εύρος διακύμανσης της τάσης τροφοδοσίας δεν πρέπει να υπερβαίνει την ονομαστική τάση  10% .
10% .
2. Δομική σύνθεση
Το μηχάνημα δοκιμής χωρίζεται σε τρεις σταθμούς εργασίας, οι οποίοι είναι το σύστημα μετάδοσης κίνησης του άξονα, το σύστημα φόρτωσης δείγματος και η αξονική δύναμη Οι τρεις σταθμοί εργασίας μοιράζονται την ίδια κίνηση ατράκτου. Δυναμικό σύστημα και σύστημα ελέγχου λογισμικού.
2.1 Σύστημα κίνησης ατράκτου
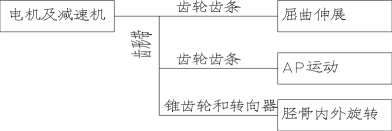
Ο κινητήρας άξονα χρησιμοποιεί ενσωματωμένο σερβομηχανικό σύστημα ελέγχου ταχύτητας και κινητήρα Panasonic AC. Η μέγιστη ισχύς του κινητήρα είναι 7,5 Kw, η ισχύς του χωρίζεται σε 3 γραμμές εξόδου.
Ο πρώτος: Μετά τη βάση ταχυτήτων, τον ηλεκτρομαγνητικό συμπλέκτη και τον αισθητήρα ροπής, γίνεται το περιστρεφόμενο εκκρεμές του μηριαίου οστού. Ο ηλεκτρομαγνητικός συμπλέκτης είναι υπεύθυνος για τον έλεγχο της ενεργοποίησης και απενεργοποίησης και ο αισθητήρας ροπής είναι υπεύθυνος για μέτρηση της ροπής . Μετρήστε τη ροπή κατά τη λειτουργία.
Το δεύτερο: αφού περάσετε από τον οδοντωτό ιμάντα και τη βάση ταχυτήτων , γίνεται παλινδρομική μετατόπιση αριστερά και δεξιά, οδηγώντας το δείγμα κίνησης AP .
Το τρίτο: μέσω της οδοντωτής ζώνης, του κωνικού γραναζιού και του συστήματος διεύθυνσης, μετατρέπεται στην περιστροφική αιώρηση της κνήμης, οδηγώντας το δείγμα να περιστρέφεται προς τα μέσα και προς τα έξω.
Η διαδρομή μετάδοσης φαίνεται στο παρακάτω σχήμα.
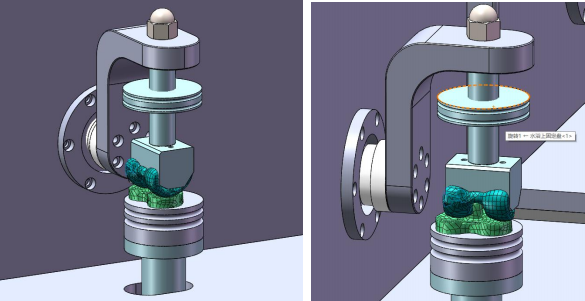
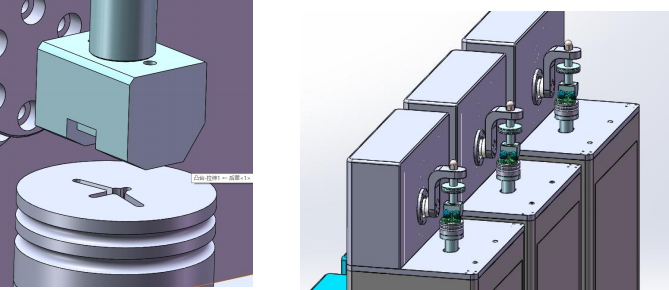
2.2 Σύστημα φόρτωσης δειγμάτων
Το σύστημα φόρτωσης δείγματος προσομοιώνει την ελευθερία κίνησης υπό ανθρώπινες συνθήκες για τα εξαρτήματα εμφυτεύματος της άρθρωσης του γόνατος Τοποθετείται και στερεώνεται. Αποτελείται από ένα κάθισμα στήριξης, ένα συρόμενο κάθισμα, ένα κάθισμα από νάιλον, ένα ρολό, ένα συρόμενο μανίκι κ.λπ.
Η συγκεκριμένη υλοποίηση είναι η εξής:
Η εγκατάσταση του εργαλείου φθοράς της άρθρωσης του γόνατος είναι σχετικά περίπλοκη. Εγκαταστήστε το αυστηρά σύμφωνα με το διάγραμμα. Επιπλέον, επισυνάπτονται τα αντίστοιχα κανάλια.
Χρησιμοποιήστε τον αντίστοιχο αριθμό καλωδίου όταν συνδέετε τα καλώδια.
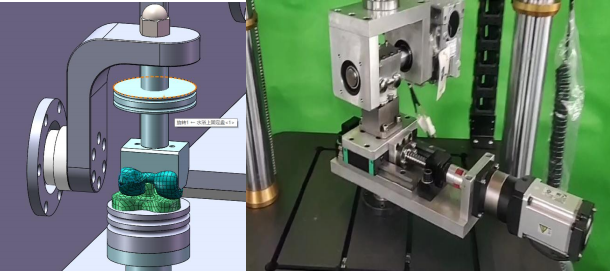
(Η δομή που φαίνεται στο σχήμα χρησιμοποιείται μόνο για την επίδειξη της αρχής της κίνησης, το πραγματικό αντικείμενο θα υπερισχύει)
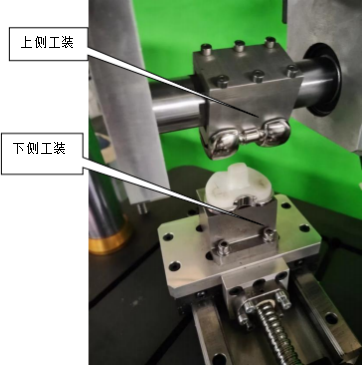

( Η δομή που φαίνεται στο σχήμα χρησιμοποιείται μόνο για την επίδειξη της αρχής της κίνησης, το πραγματικό αντικείμενο θα υπερισχύει)
Πρέπει να επεξεργαστείτε ξανά το επάνω και το κάτω εργαλείο σύμφωνα με το δείγμα για να ανταποκριθείτε στις απαιτήσεις δοκιμής. (Κάθε μέγεθος προϊόντος Οι λεπτομέρειες ποικίλλουν)

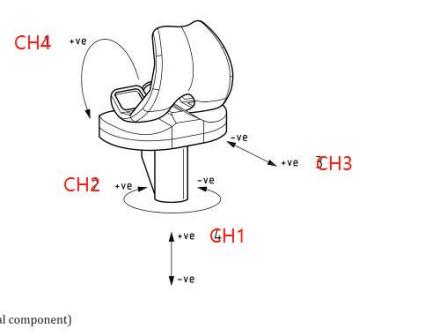
6. Επιλογή καναλιού και σχετικές προσαρμογές
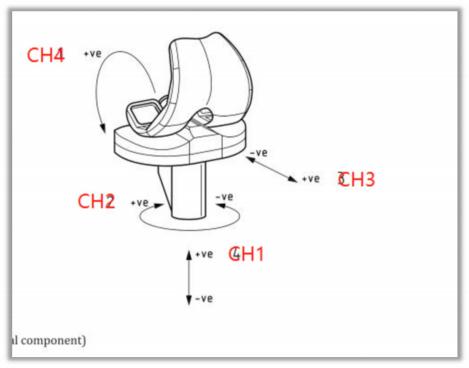
Σε συνδυασμό με την παραπάνω εικόνα, ελέγξτε ποιο κανάλι λειτουργεί ελέγχοντας το κανάλι. Κατά την εκτέλεση του ISO 14243.3, επιλέξτε 1-4 διάδρομος, το Channel 5 είναι ένα κανάλι επέκτασης για επόμενες αναβαθμίσεις. Για άλλα πειράματα μονού ή διπλού άξονα, επιλέξτε το αντίστοιχο κανάλι.
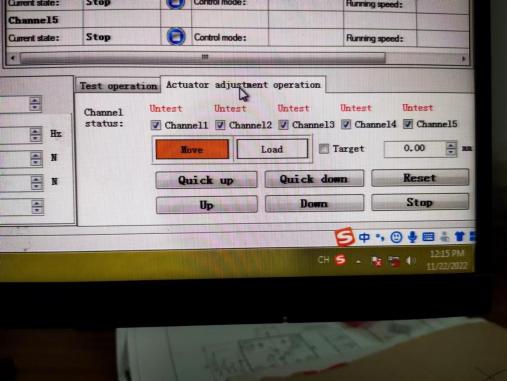
Quick up/up = γρήγορη φόρτωση/φόρτωση
Γρήγορη πτώση/κάτω = Γρήγορη πτώση/κάτω
7. Αντιστοιχεί στο ISO 14243.3 , είναι απαραίτητο να εισαγάγετε την κυματομορφή ελέγχου, όπως φαίνεται στο σχήμα:
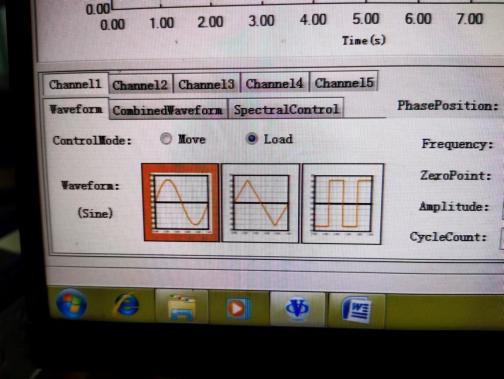
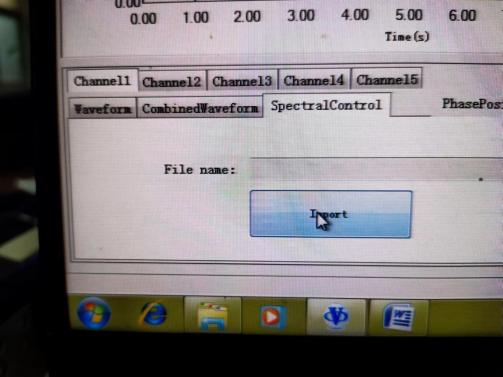
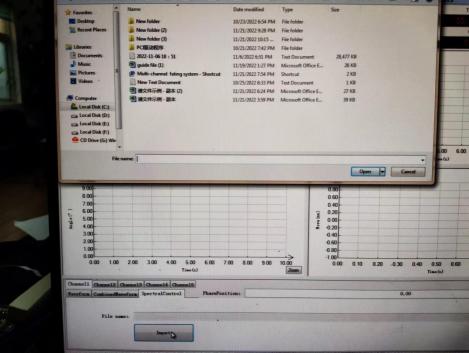
Επιλέξτε την εργοστασιακά προκαθορισμένη κυματομορφή. Εάν χρειάζεται να ορίσετε μια νέα κυματομορφή ή ενέργεια, μπορείτε να το κάνετε σε αυτό το αρχείο. Τροποποιήστε και αποθηκεύστε με άλλο όνομα.
Για λεπτομερείς προσαρμογές για κάθε κανάλι, ανατρέξτε στο εγχειρίδιο λογισμικού ενός καναλιού.
8. Σχετικά με την προστασία:
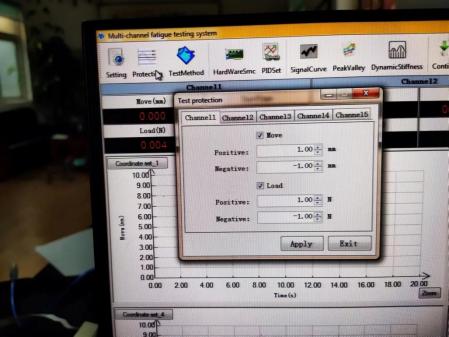
το πείραμα δεν μετακινείται ή δεν μπορεί να εκτελεστεί αφού κάνετε κλικ στο κουμπί Έναρξη, ελέγξτε εάν υπάρχουν παράμετροι εκτός ανοχής στις επιλογές προστασίας.
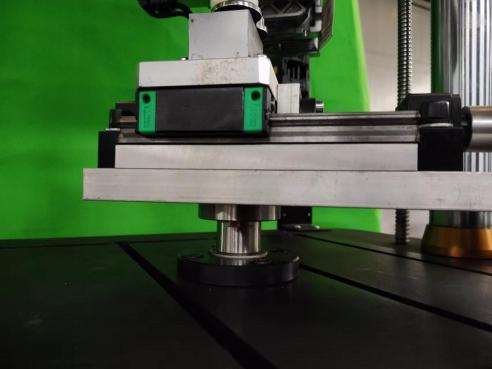
2.3 Σύστημα φόρτωσης αξονικής δύναμης
Αυτό το μηχάνημα υιοθετεί μια δομή φόρτωσης ελατηρίου. Ο μηχανισμός φόρτωσης κινείται από έναν βηματικό κινητήρα, ο οποίος μεταδίδεται μέσω ενός οδοντωτού ιμάντα κυκλικού τόξου, μιας σύγχρονης τροχαλίας και ενός ζεύγους σφαιρικής βίδας ακριβείας και οδηγείται από μια ράγα οδήγησης γραμμικής κίνησης ακριβείας για να κινεί το κάθισμα εφαρμογής δύναμης. Το κάθισμα εφαρμογής δύναμης στερεώνεται με μηχανισμό με ελατήριο, ο οποίος ασκεί δύναμη στην ολισθαίνουσα πλατφόρμα μετά τη συμπίεση του ελατηρίου. Η δύναμη δοκιμής μεταξύ των επιφανειών τριβής του δοκιμίου του κυλίνδρου σχηματίζεται. Ελέγχοντας τον κινητήρα για να οδηγεί το δυναμικό κάθισμα να κινείται προς τα εμπρός και προς τα πίσω στο διάστημα, δηλαδή, μπορεί να ελεγχθεί η εφαρμογή και το μέγεθος της δοκιμαστικής δύναμης. Ένας αισθητήρας φορτίου είναι εγκατεστημένος στο επίπεδο του καθίσματος εφαρμογής δύναμης. Συλλέξτε σήματα δύναμης. Ο οδηγός ρουλεμάν γραμμικής κίνησης εξασφαλίζει την εφαρμογή και τη σταθερότητα της δοκιμαστικής δύναμης. Εξάρτημα φόρτωσης ελατηρίου Εύκολη φόρτωση και εκφόρτωση.
Όταν αρχίσει να φορτώνεται η δύναμη δοκιμής, ο αισθητήρας θα εισάγει την προκαθορισμένη πίεση στο σύστημα ελέγχου μικροϋπολογιστή και την προκαθορισμένη πίεση. Στη συνέχεια, ο μικροϋπολογιστής ελέγχει τον κινητήρα για να αντιστραφεί μέχρι να εξισορροπηθεί η πίεση του συστήματος με την προκαθορισμένη πίεση.
2.4 Σύστημα εμποτισμού φορτίου
ενός κουτιού υγρού εμβάπτισης, ενός θερμαντήρα, ενός αισθητήρα θερμοκρασίας, μιας περισταλτικής αντλίας, ενός σωλήνα σιλικόνης, κ.λπ.
Οι πελάτες μπορούν να επεξεργαστούν τις οπές τοποθέτησης στην κυλινδρική ακραία επιφάνεια σύμφωνα με το πραγματικό μέγεθος του δείγματος και η γωνία σύσφιξης είναι ρυθμιζόμενη. Αφού ρυθμίσετε τη γωνία, κλειδώστε το αριστερό ρυθμιστικό τοποθέτησης .
2.5 Σύστημα ελέγχου λογισμικού Το σύστημα ελέγχου είναι εγκατεστημένο στο μηχάνημα ελέγχου και συνδέεται με τον κεντρικό υπολογιστή δοκιμής μέσω ενός καλωδίου επικοινωνίας. Το περιβάλλον λειτουργίας λογισμικού είναι τα WINDOWS XP. Το λογισμικό ελέγχου είναι μια γραφική διαδραστική διεπαφή λειτουργίας, η οποία είναι υπεύθυνη για την αποστολή οδηγιών για τον έλεγχο της εκκίνησης και διακοπής του συστήματος, της ταχύτητας λειτουργίας, της δύναμης φόρτωσης, της θερμοκρασίας υγρού βύθισης και της συλλογής δεδομένων λειτουργίας του συστήματος όπως αξονική δύναμη, ροπή, θερμοκρασία, χρόνο δοκιμής κ.λπ. κατά τη διάρκεια της δοκιμής. Μετά τον υπολογισμό και την επεξεργασία, οι καμπύλες δοκιμαστικής δύναμης-χρόνου, ροπής-χρόνου και άλλες καμπύλες δεδομένων εξάγονται με τη μορφή διαγραμμάτων. Σε συνδυασμό με την παραπάνω εικόνα, ελέγξτε το κανάλι για να επιβεβαιώσετε ποιο κανάλι λειτουργεί. Κατά την εκτέλεση του ISO 14243.3, επιλέξτε 1-4 κανάλια, 5 t το κανάλι είναι ένα κανάλι επέκτασης για επόμενες αναβαθμίσεις. Για άλλα πειράματα μονού ή διπλού άξονα, επιλέξτε το αντίστοιχο κανάλι. Γρήγορη ανύψωση/επάνω = γρήγορη φόρτωση/φόρτωση Quick down/down = γρήγορη απεγκατάσταση/απεγκατάσταση 7. Αντιστοιχεί στο ISO 14243.3 , είναι απαραίτητο να εισαγάγετε την κυματομορφή ελέγχου, όπως φαίνεται στο σχήμα: Επιλέξτε την εργοστασιακή προκατασκευασμένη κυματομορφή. Εάν χρειάζεται να ορίσετε μια νέα κυματομορφή ή ενέργεια, μπορείτε να την τροποποιήσετε σε αυτό το αρχείο. Αποθήκευση με άλλο όνομα. Για λεπτομερείς προσαρμογές για κάθε κανάλι, ανατρέξτε στο εγχειρίδιο λογισμικού ενός καναλιού . 8. Σχετικά με την προστασία: το πείραμα δεν μετακινείται ή δεν μπορεί να εκτελεστεί αφού κάνετε κλικ στο κουμπί Έναρξη, ελέγξτε εάν υπάρχουν παράμετροι εκτός ανοχής στις επιλογές προστασίας. 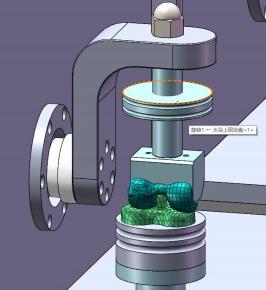
 {0}7056} {196}
{0}7056} {196}

 {0}76}
{0}76}
 Μηχανή δοκιμής κόπωσης διπλού καναλιού και μπάρας ισορροπίας
Μηχανή δοκιμής κόπωσης διπλού καναλιού και μπάρας ισορροπίας
 Μηχανές δοκιμών τριβής παλινδρομικού υλικού δοντιών
Μηχανές δοκιμών τριβής παλινδρομικού υλικού δοντιών
 Περιστροφική μηχανή δοκιμής κόπωσης κάμψης
Περιστροφική μηχανή δοκιμής κόπωσης κάμψης
 Μηχανή δοκιμής κόπωσης κάμψης οστών
Μηχανή δοκιμής κόπωσης κάμψης οστών
 Μηχανή Ενδομυελικής Δοκιμαστικής Διάτμησης Νυχιών
Μηχανή Ενδομυελικής Δοκιμαστικής Διάτμησης Νυχιών
 Μηχανή δοκιμής κόπωσης συμπίεσης και στρέψης συστήματος εσωτερικής στερέωσης σπονδυλικής στήλης
Μηχανή δοκιμής κόπωσης συμπίεσης και στρέψης συστήματος εσωτερικής στερέωσης σπονδυλικής στήλης